Featured Projects
Robotics projects in perception, control, and autonomy
MonoSense: Monocular Perception Pipeline
FEATUREDApril 2026
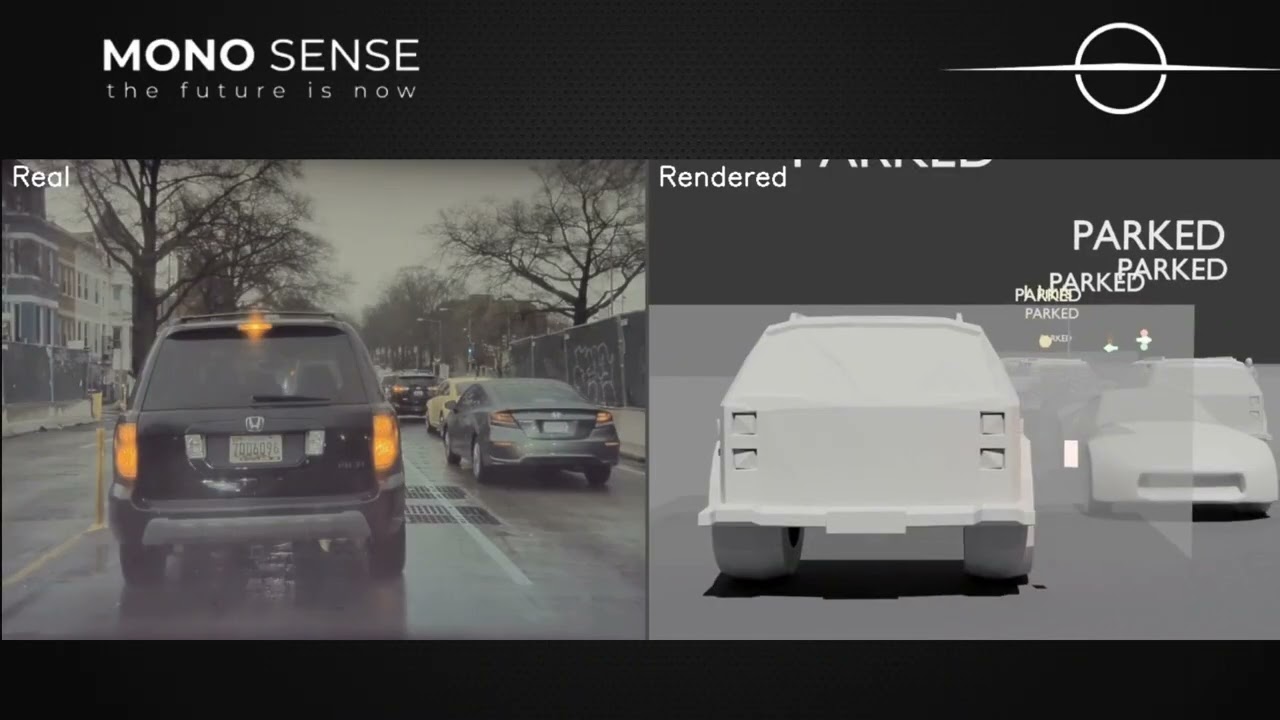
Tesla-inspired end-to-end monocular perception pipeline for autonomous driving with 3D scene reconstruction and real-time visualization
Key Achievements
- Trained custom YOLOv6 on BDD100K dataset achieving mAP50 of 0.564 for multi-class object detection
- Integrated DepthAnythingV2 for metric depth estimation and FCOS3D for 3D vehicle pose estimation
- Implemented UFLDv2 for lane detection with inverse perspective mapping
- Built ego-motion estimation using RANSAC-based visual odometry
March to April 2026
Deep Visual Inertial Odometry
Deep learning VIO stack for UAVs with 6 fusion approaches on custom Blender rendered trajectories.
- Implemented 6 VIO approaches: vision only (DeepVO style), AirIMU+AirIO, PRGFlow, PRGFlow+yaw, EKF loose fusion, cross attention tight fusion
- Built vision only odometry using Siamese MobileNetV2 + correlation + LSTM for relative pose estimation
- Integrated AirIMU (IMU correction) + AirIO (velocity prediction) + 15 state EKF for state estimation
April 2026
Imitation Learning for Robotic Stacking
Behavioral Cloning vs Diffusion Policy comparison for UR5e robotic stacking with keyboard teleoperation.
- Implemented BC Transformer and Diffusion Policy for UR5e robotic stacking task in robosuite simulator
- Collected expert demonstrations via keyboard teleoperation (7 DOF control: xyz, roll pitch yaw, gripper)
- Trained BC Transformer with dual camera image observations (84x84 agentview + eye in hand)
March 2026
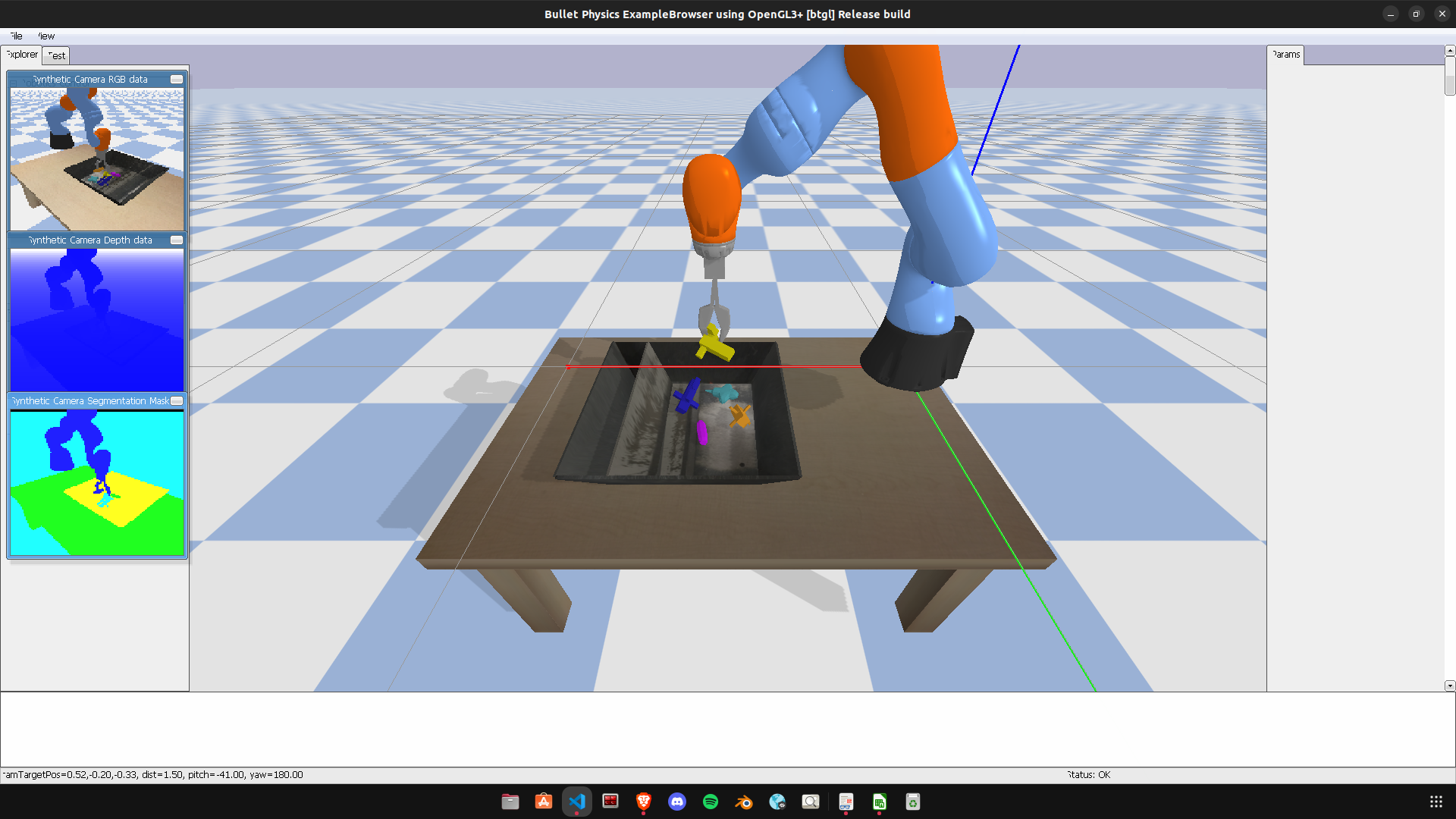
Deep Reinforcement Learning for Robotic Picking
Implementation of deep RL algorithms (REINFORCE, Actor Critic, A3C) for robotic manipulation tasks.
- Implemented REINFORCE, Actor Critic, and A3C algorithms from scratch
- Achieved 100+ mean reward on LunarLander v2 environment
- Achieved 25%+ success rate on PyBullet Kuka robotic grasping task over 100 episodes
February to March 2026
Structure from Motion and Neural Radiance Fields
Implemented classical Structure from Motion pipeline from scratch and trained Neural Radiance Fields for photorealistic 3D scene reconstruction.
- Implemented complete SfM pipeline: RANSAC feature matching, 8 point fundamental matrix, essential matrix decomposition, cheirality based pose disambiguation, linear/nonlinear triangulation
- Built PnP solver with RANSAC for camera registration from 2D to 3D correspondences
- Reduced reprojection error by 36% (from 33.2 to 21.2 pixels) using sparse bundle adjustment
August to December 2025
Franka Panda Grasping Pipeline
Built as part of directed research at WPI. The robot needed to pick waste objects off a moving conveyor belt and sort them. I integrated RealSense depth data with an antipodal grasping network in ROS 2 and handled singularities using a Jacobian based differential controller. Also replaced the existing Arduino conveyor controller with a Beckhoff TwinCAT PLC for real time determinism.
November to December 2025
Quadrotor Trajectory Control
Implemented PD and LQR controllers in PyBullet simulation, then validated on real Crazyflie 2.0 hardware. Performed system identification reducing sim to real RMSE from 4.8mm (simulation) to 0.8mm (real hardware), an 83% improvement. LQR controller maintained position error below 2cm on hardware. Also implemented polynomial trajectory generation for smooth 3D paths.